初めてのロボット(砲台編)
1. 砲台の設置
-
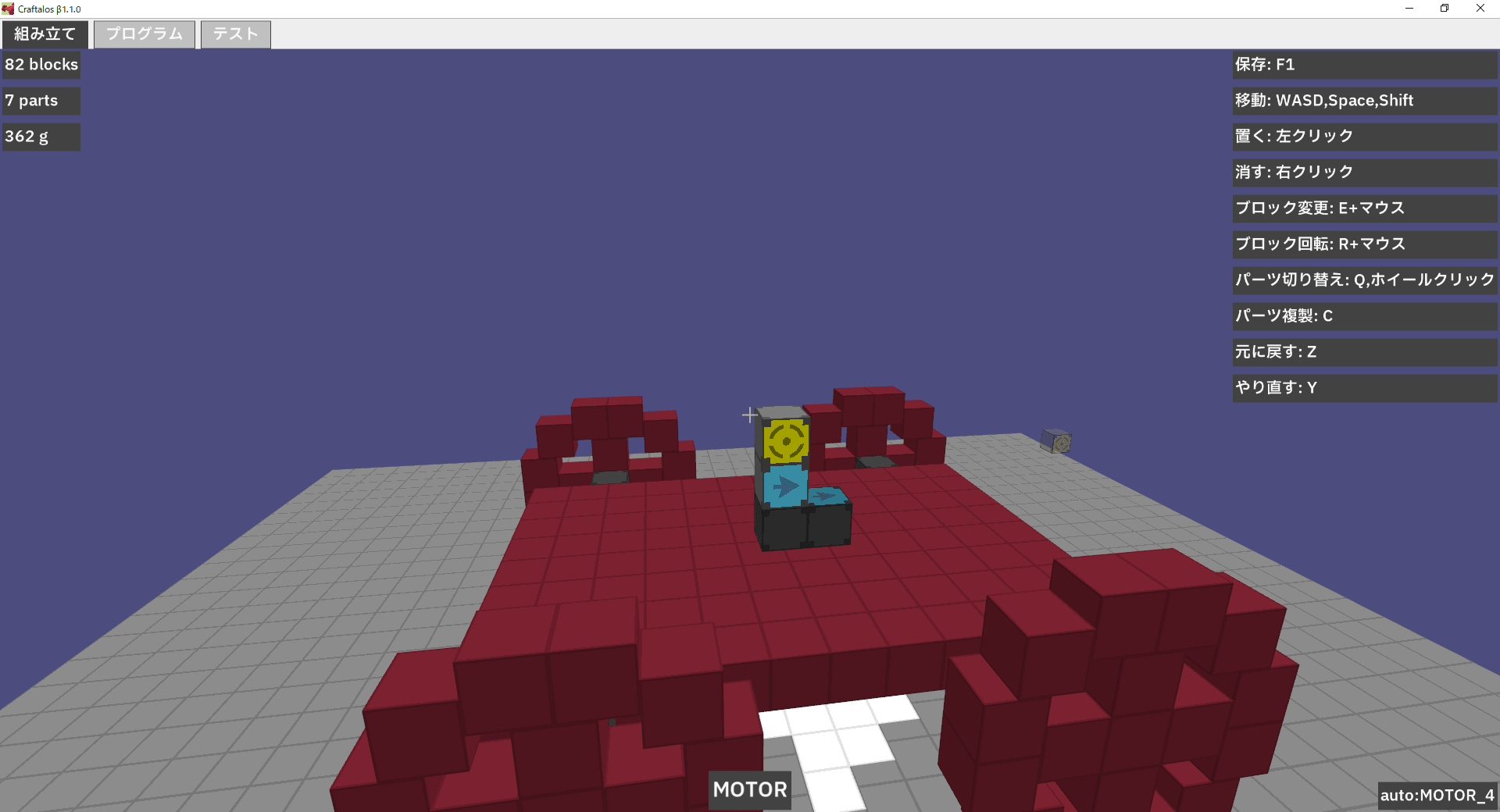
矢印が上の面で前を向くように「MOUSE AXIS」ブロックを置きます。
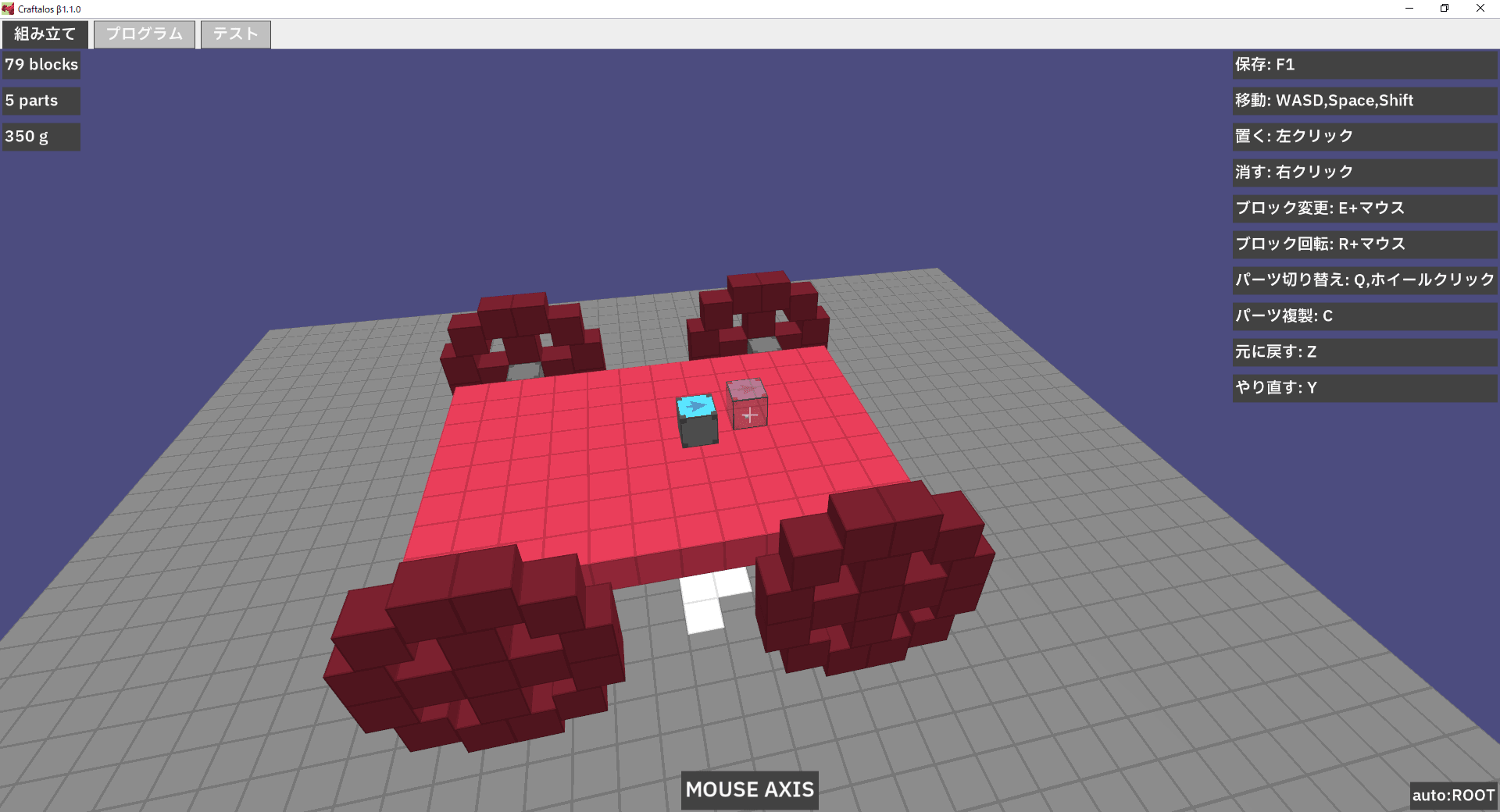
-
上向きにモーターを置きます。
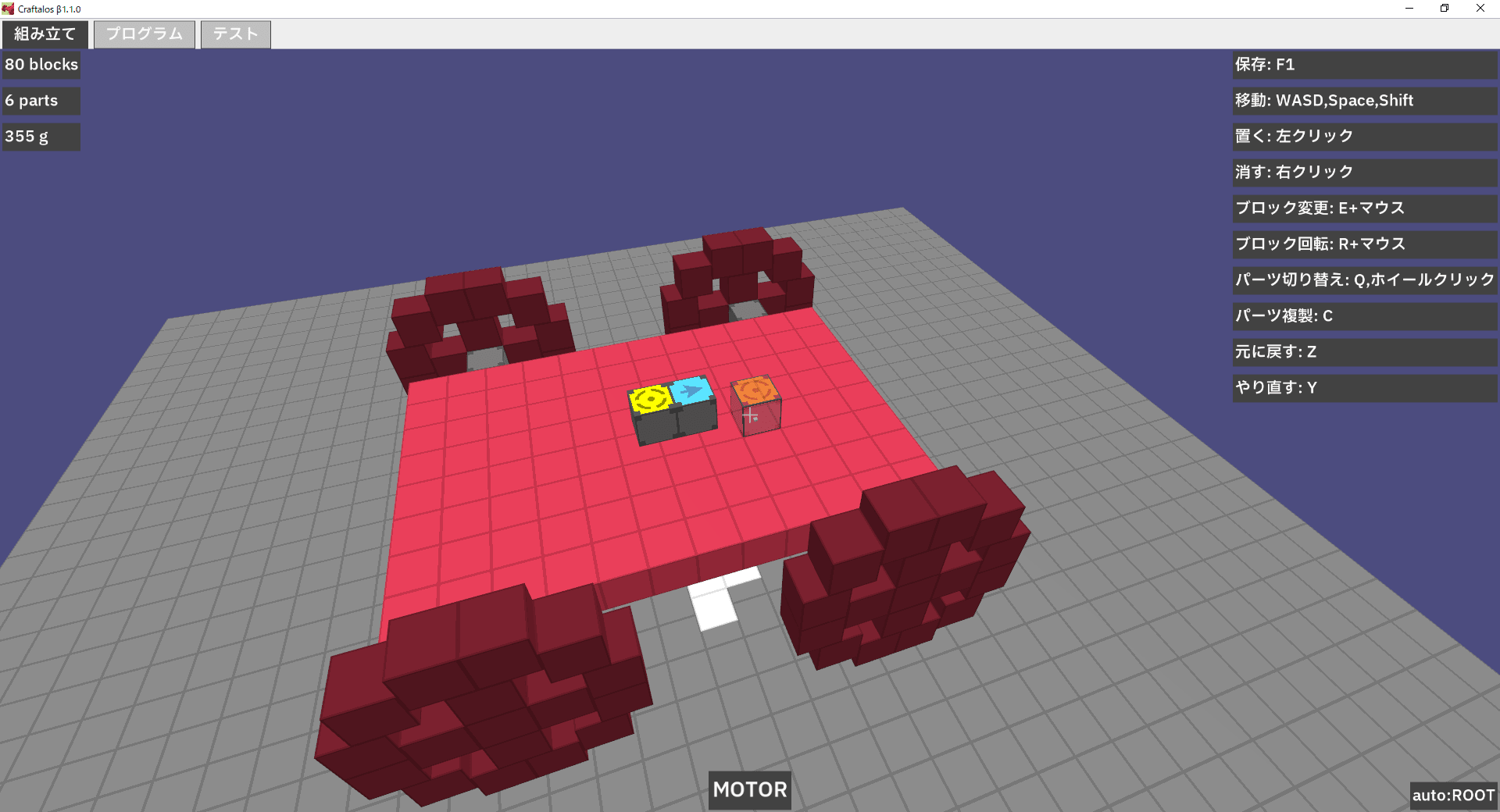
-
矢印が機体右の面で前を向くように「MOUSE AXIS」ブロックを置きます。
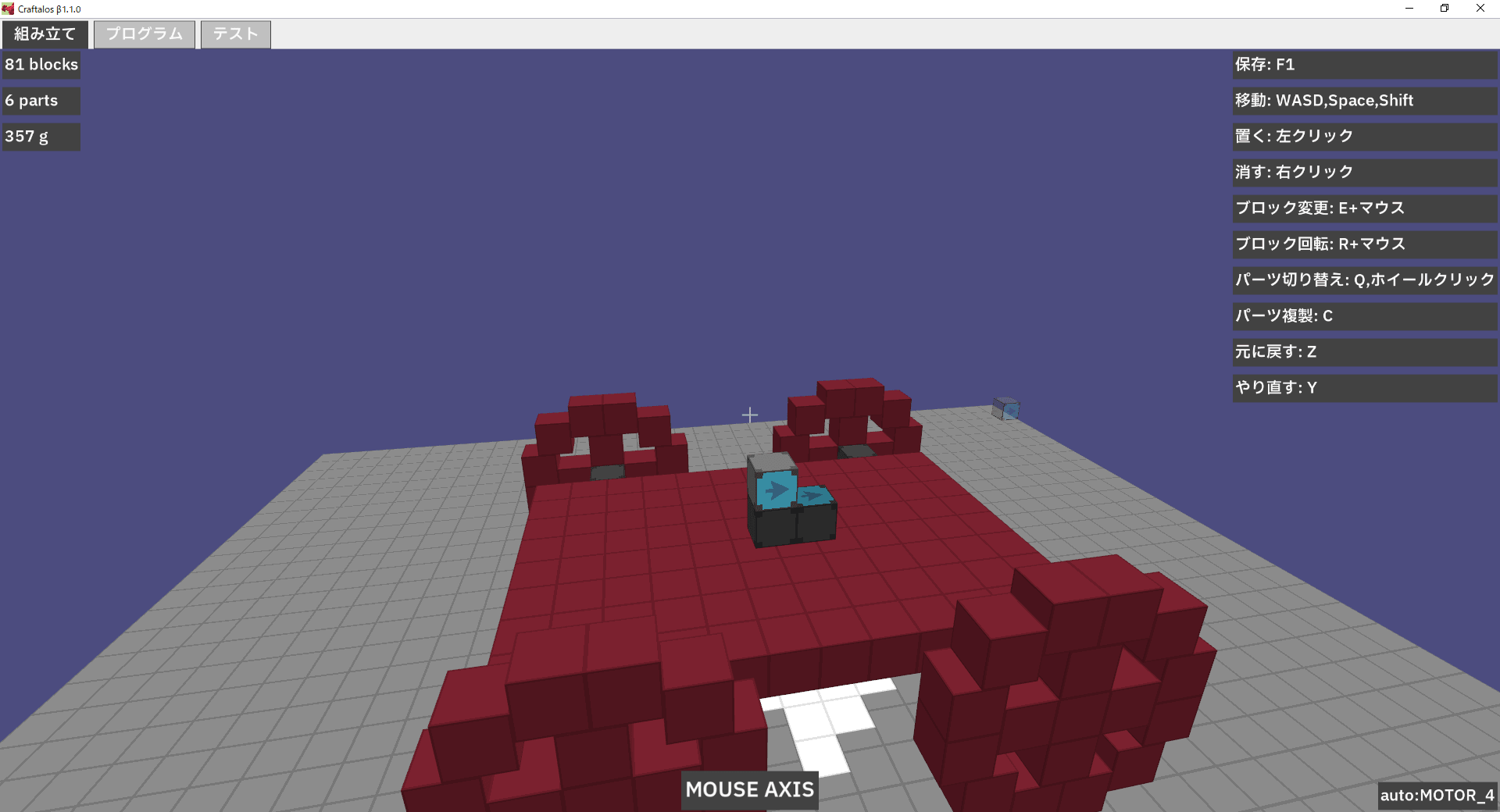
-
右向きにモーターを置きます。
-
サポート用にブロックを置きます。モーターの黄色の面からつなげてくる必要があります。
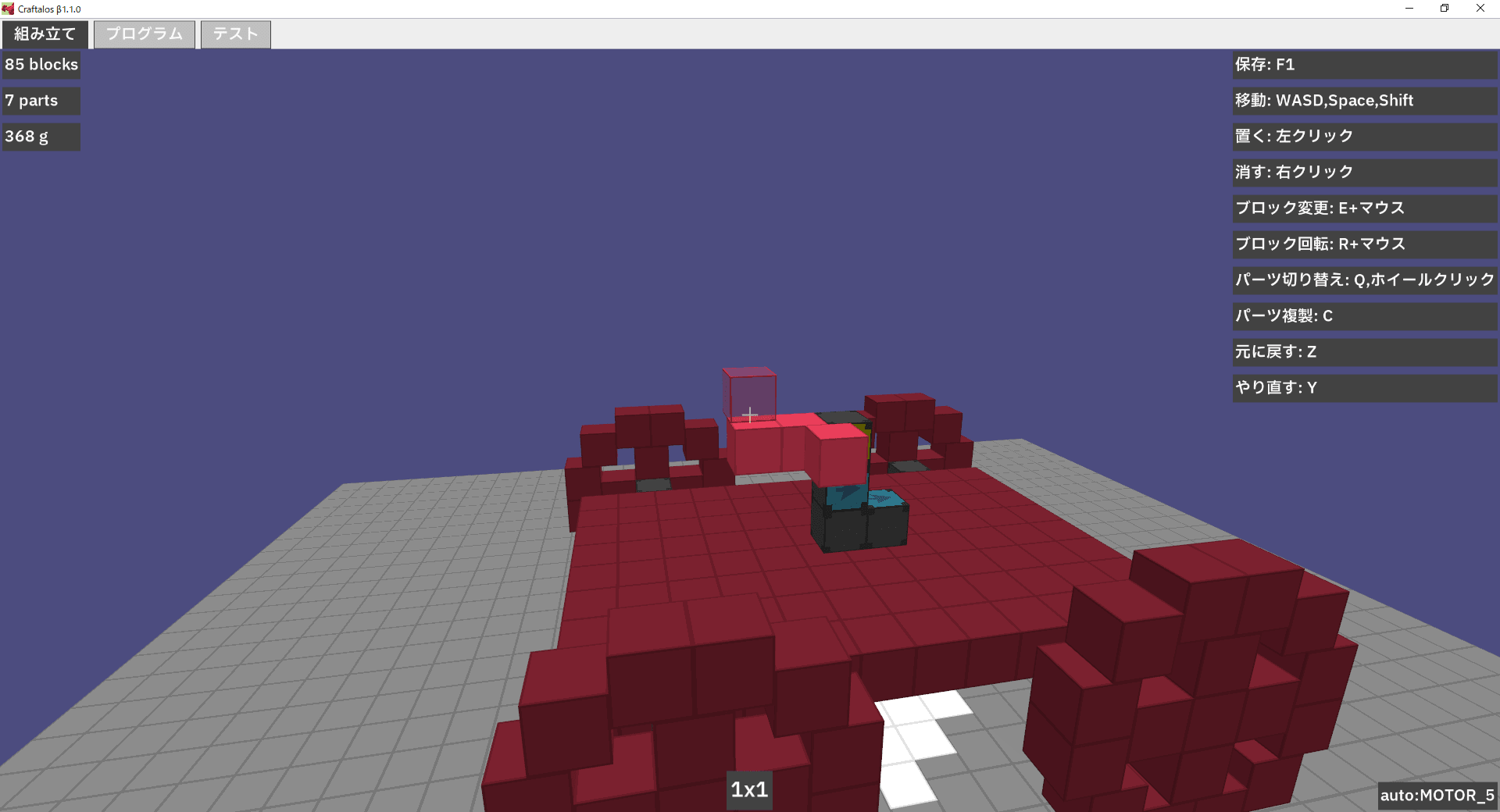
-
2つのサポートブロックを消し、「RIFUL_6」ブロックを4つ置きます。
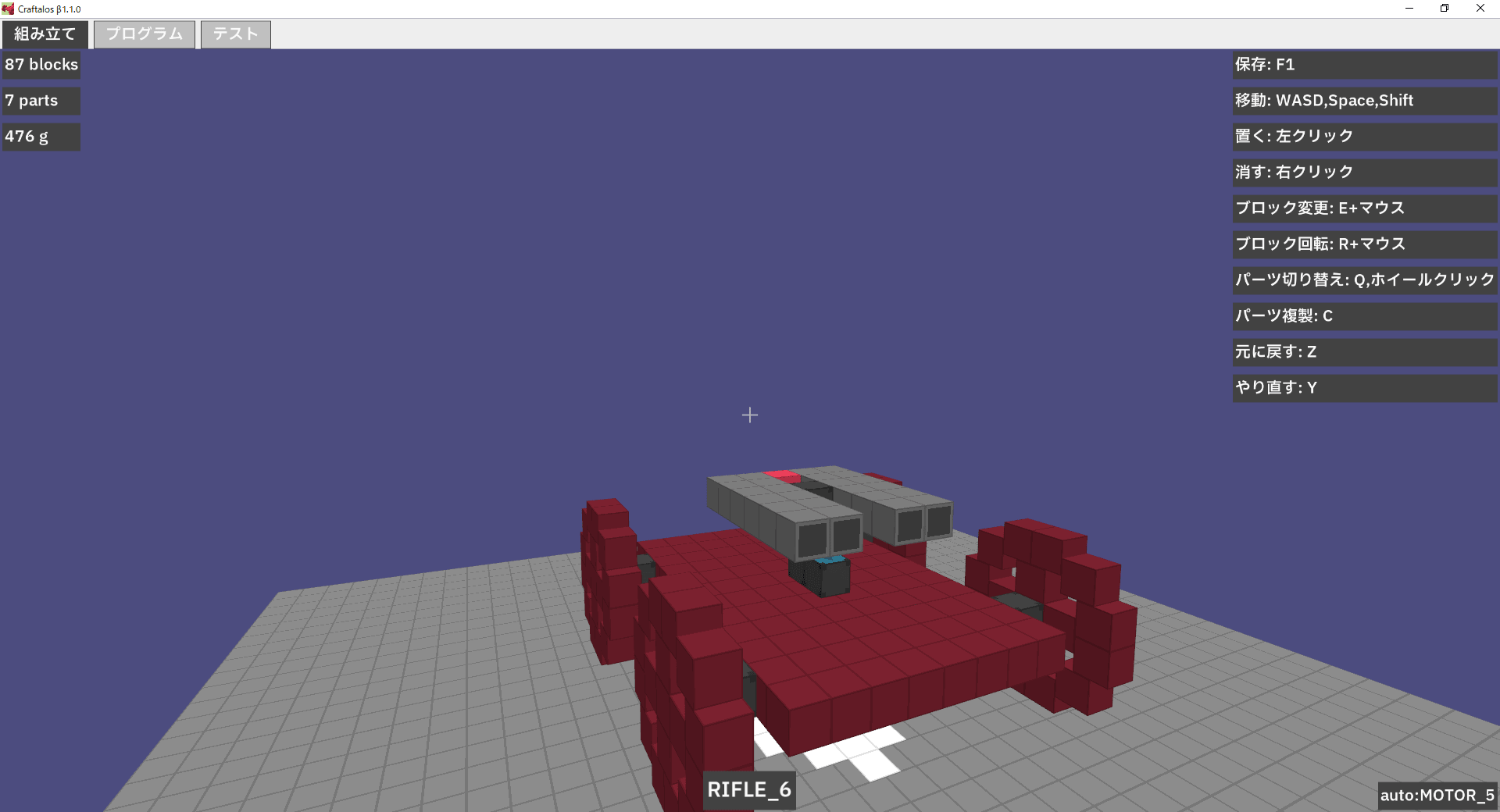
- 保存します。
2. 砲台のプログラム
画像のようにプログラムを組みます。
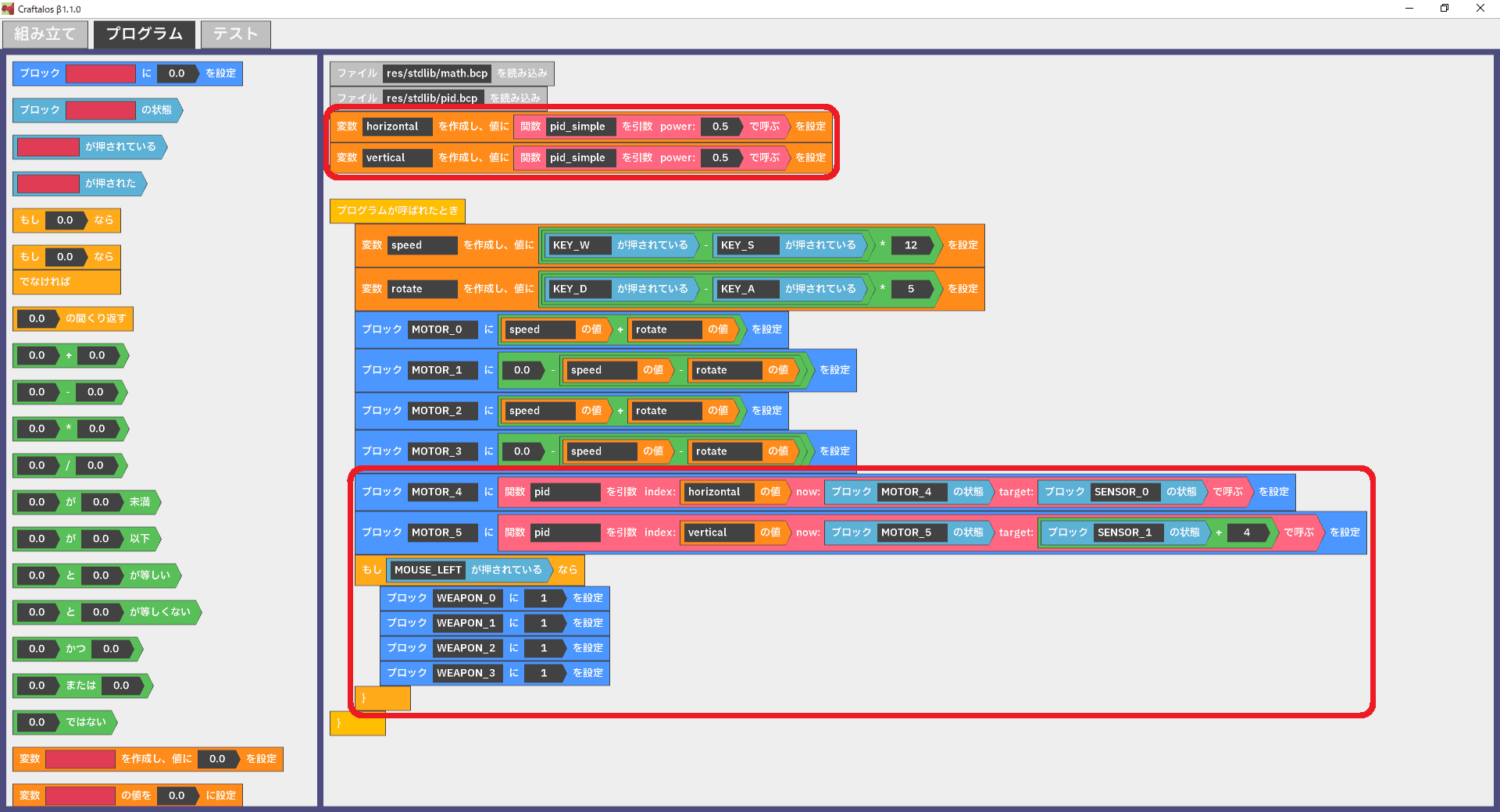
MOUSE_AXISブロックからカメラの向きを取得できます。 pidという機能を使うことで、モーターをカメラの方向に向けるために必要な電圧を計算しています。
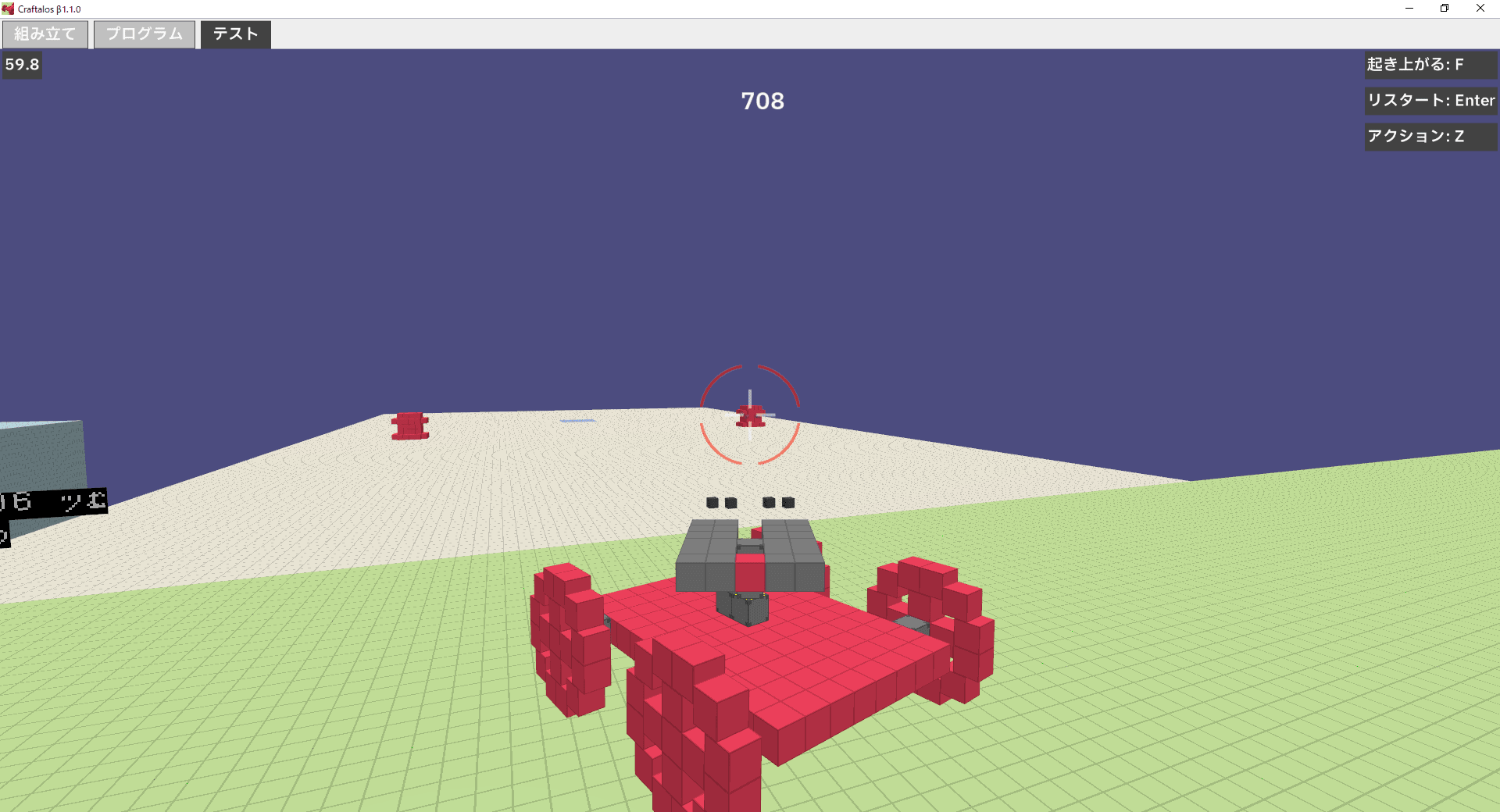
3. テスト
砲台が回転し、左クリックで発射できれば成功です。